There are four fundamental forces in nature: gravitational, electromagnetic, weak nuclear, and strong nuclear. Gravitational force is the weakest known forces in nature. It is a long range force. It exists due to mass of the objects. Electromagnetic force is also a long range force and is stronger than gravitational force. It exists due to charges of the objects. Strong nuclear force is the strongest known force but it is the shortest range force which only exists inside the nucleus. Its main job is to hold subatomic particles of the nucleus together. (i.e. binding the positively charged protons and neutral neutrons inside the nucleus). Weak nuclear force is weaker than strong nuclear force and electromagnetic force. It is also a very short range force and accounts for the radioactivity in unstable nuclei.
For a large-scale, electrically neutral objects such as those encountered in this course, the only force that acts at a distance is the gravitational force. All other forces we encounter will be contact forces (mechanical forces) that occur at the boundary of an object where that object physically touches some other object, e.g. tension, friction, normal, and other applied forces [Subsection 4.1.3]. Actually, mechanical force, or chemical force, or any other kinds of force are all electromagnetic forces. In our daily life almost all force we experienced are electromagnetic force except the force of gravity. Strong nuclear forces are very short range and we do not feel them dispite the fact that it is more powerful than the electromagnetic force. Weak forces are also short range and even weaker than electromagnetic force.
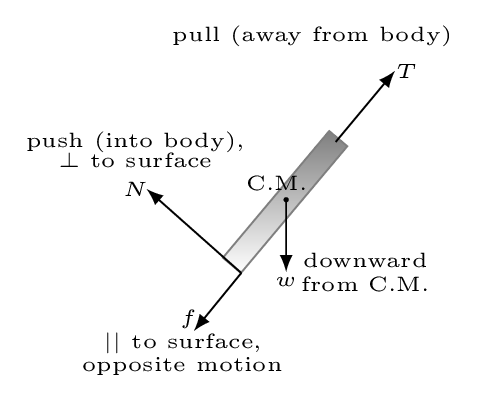
To identify forces acting on a body, first identify the boundary of that object and include the weight of everything inside that boundary. Then identify everything that touches the boundary from outside the object and include an appropriate force for each point of contact.
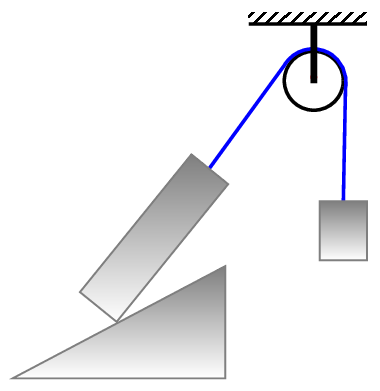
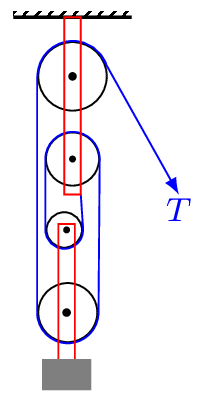
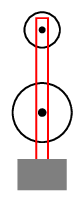
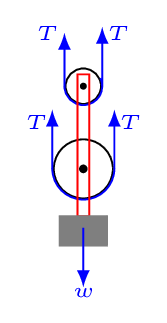
Note that massless, frictionless pulleys as shown below adjust themselves so that the tension is the same on both sides of the pulley. Figure 4.1.3.(a) is a system of pulleys, Figure 4.1.3.(b) is an isolated system, and Figure 4.1.3.(c) a free-body diagram.