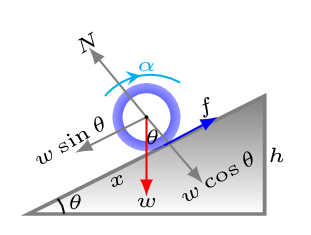
Since the disk is rolling without slipping, the maximum friction acting on the point of contact of disk and ramp must be static (i.e.,
\(0\leq f_{s}\leq \mu_{s}N\)). Now, whether the system is accelerating or not for the maximum ratio of
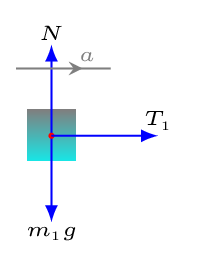
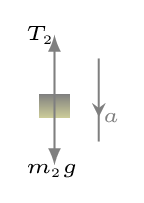
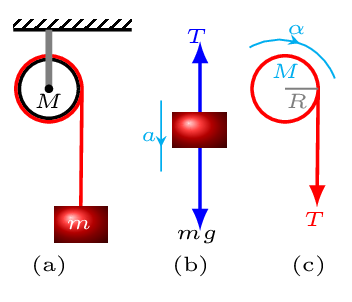
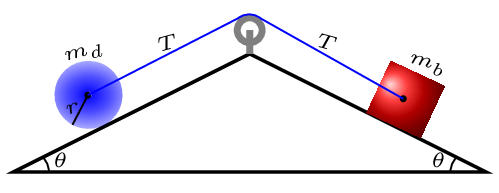
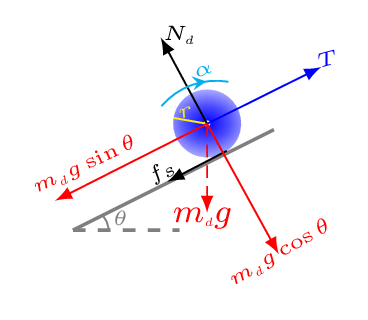
\(\frac{m_{b}}{m_{d}} \) can be determined by the evaluation of final equation. From the free-body diagram construct equations as shown below. From [Figure (b)] consider the disk is accelerating upwards with an acceleration
\(a\) for now, then
\begin{equation}
\sum F_{x}= T-m_{d}g\sin\theta-f_{s}=m_{d}a \tag{7.4.20}
\end{equation}
\begin{equation}
\sum F_{y} = N_{d}-m_{d}g\cos\theta=0 \tag{7.4.21}
\end{equation}
\begin{equation}
\text{but,}\quad f_{s} = \mu_{s}N_{d}\tag{7.4.22}
\end{equation}
\begin{equation}
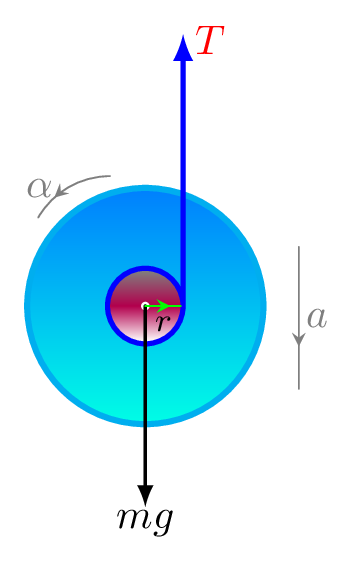
\text{and}\quad \sum\Gamma = -f_{s}r = -I\alpha \tag{7.4.23}
\end{equation}
\begin{equation*}
\therefore f_{s}r = I\alpha
\end{equation*}
\begin{equation*}
\text{or,}\quad \mu_{s}N_{d}r= \mu_{s}m_{d}g\cos\theta r= \frac{1}{2}m_{d}r^{2}\left(\frac{a}{r}\right)\quad [\because a=r\alpha]
\end{equation*}
\begin{equation}
\therefore\quad a=2\mu_{s}g\cos\theta = 2\times0.05\times9.8\times\cos(30^{o}) =0.85\,m/s^{2} \tag{7.4.24}
\end{equation}
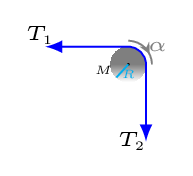
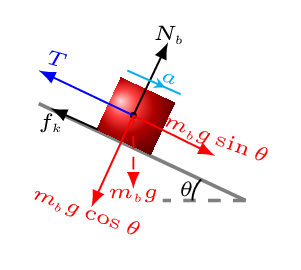
From [Figure (c)] the disk is accelerating downwards with an acceleration
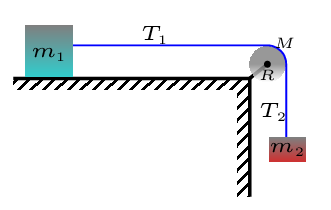
\(a\) because the block is connected to the disk through same rope via massless and frictionless pulley and hence has the same tension and acceleration, therefore
\begin{equation}
\sum F_{x} = m_{b}g\sin\theta -f_{k}-T = m_{b}a \tag{7.4.25}
\end{equation}
\begin{equation}
\sum F_{y} = N_{b}-m_{b}g\sin\theta = 0 \tag{7.4.26}
\end{equation}
\begin{equation}
\text{but}\quad f_{k}=\mu_{k}N_{b} \tag{7.4.27}
\end{equation}
\begin{equation}
T = m_{d}g\sin\theta +\mu_{s}m_{d}g\cos\theta +m_{d}a \tag{7.4.28}
\end{equation}
\begin{equation}
T = m_{b}g\sin\theta -\mu_{k}m_{b}g\cos\theta -m_{b}a \tag{7.4.29}
\end{equation}
\begin{equation*}
m_{b}\left[g\sin\theta -\mu_{k}g\cos\theta -a\right] = m_{d}\left[g\sin\theta +\mu_{s}g\cos\theta +a\right]
\end{equation*}
\begin{equation*}
\therefore \quad \frac{m_{b}}{m_{d}} = \frac{\left[g\sin\theta +\mu_{s}g\cos\theta +a\right]}{\left[g\sin\theta -\mu_{k}g\cos\theta -a\right] }
\end{equation*}
\begin{equation*}
= \frac{5.32+0.85}{3.63-0.85} = 2.22
\end{equation*}
If the system is not accelerating but moving with constant velocity, then \(a=0.\) Hence in that case
\begin{equation*}
\frac{m_{b}}{m_{d}} = \frac{\left[g\sin\theta +\mu_{s}g\cos\theta \right]}{\left[g\sin\theta -\mu_{k}g\cos\theta \right] }
\end{equation*}
\begin{equation*}
=\frac{5.32}{3.63} = 1.46
\end{equation*}